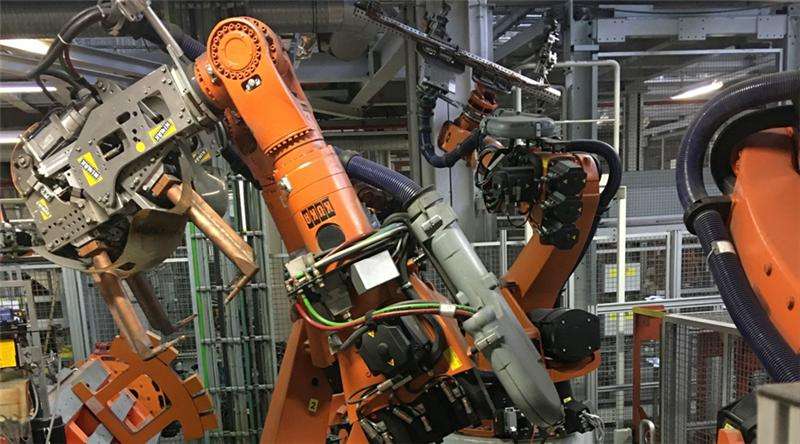
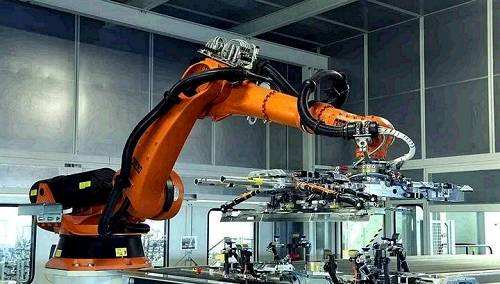
西门子焊接机器人出现焊缝异位维修:有一安徽合肥的厂家,他们使用的是西门子的焊接机器人。**近机器人在生产过程中出现了焊缝异位的问题。我们都知道大量的计划外停机时间是会增加维修成本的。因此客户很快的通过网络找到了凌科,以解决问题。收到设备后,我们马上安排进行了维修工作。
下面凌科对于西门子焊接机器人出现焊缝异位故障的原因分析及维修方法:
我们都知道除了速度外,西门子机器人焊接系统的**优势之一是它提供的可重复性以及随后的焊接质量。如果焊接操作员开始发现不一致的焊缝或异位焊缝,则TCP可能有问题。TCP是工具的重点。对于自动焊接系统,它指的是自动MIG焊枪的位置,以及它与接头中焊丝的位置(焊枪到工作距离)。**常见的是TCP的问题是在碰撞后发生的,在此期间,MIG机枪的脖子弯曲了。为了解决该问题,我们应使用颈部检查夹具或颈部对准工具,以确保将颈部弯曲到适当的角度。检查西门子机器人的颈部有没有的正确安装。如果颈部没有准确的对准,则可能会延伸得太远并导致TCP问题。为了防止将来出现问题,对TCP检查进行编程以验证位置是否正确也可能会有帮助。
但是,我们也不能假定焊接异位总是由错误的TCP引起的。在某些情况下,这可能是由于不正确的固定,导致零件移动的固定或西门子焊接机器人基座松动的结果。否则零件本身可能会有变化。要区分TCP问题和其他可能导致异位焊接的问题,请先将颈部从机器人上取下,通过机器人程序实施TCP检查,并确认所有部件都在就地。如果一切正常,则问题可能出在零件或位置上。
西门子焊接机器人出现焊缝异位维修总结:当焊接机器人的焊接系统出现问题时,至关重要的是尽快,准确地识别问题。快速的故障排除不仅可以确保操作返回到生产可重复使用的高质量零件,而且还可以帮助避免不必要的更换零件成本,而这些零件可能不需要更换。始终首先从**简单的解决方案开始,并考虑保留一份设置和维护程序清单。有了快速参考点,可以通过识别在常规操作过程中已更改的潜在变量来帮助简化故障排除过程。
 7*24维修服务支持
7*24维修服务支持 全行业解决方案
全行业解决方案 1小时快速响应
1小时快速响应 专注西门子工控维修
专注西门子工控维修 完善的售后服务支持
完善的售后服务支持